


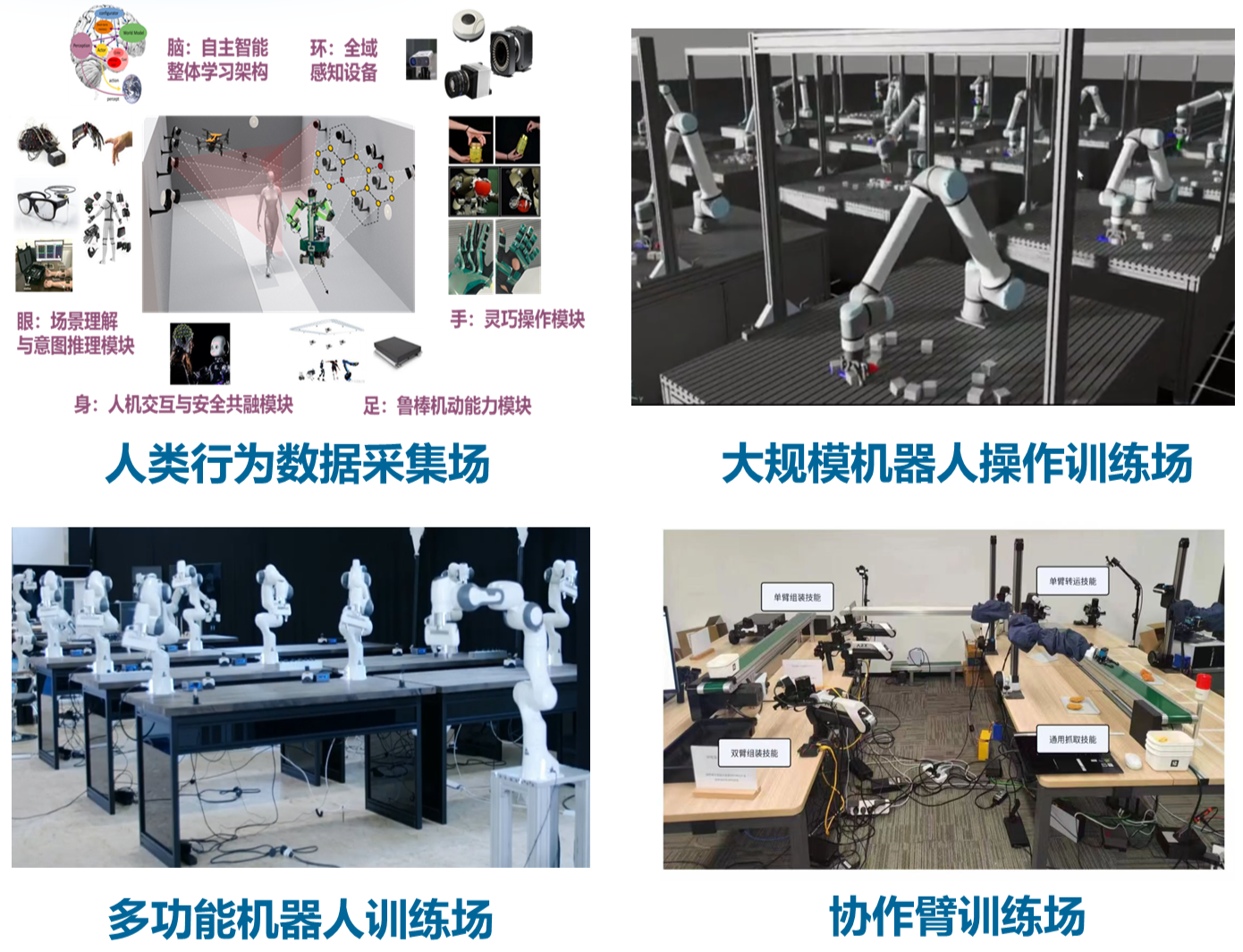
建立人类行为数据“采集场”和大规模机器人操作“训练场”
基于仿生学研发机器人新型结构。尤其是模拟人体的肌骨结构与运动参数,设计仿生关节以实现能够应对复杂环境的灵巧本体机构。并研发精密驱控一体化关节模组,提升机器人关节精密运动与高爆发力矩。
仿生机理研究
多关节协同运动控制模型
仿生机构设计
精密驱控一体化关节模组设计
多关节协同底层运动控制模型

通讯地址:上海市曹安公路4800号开物馆
电子邮箱:auro@tongji.edu.cn
© 2025 Institute of Autonomous Intelligent Robotics. All rights reserved.