


聚焦于机器人端到端行走与操作的“机器小脑”、具身大模型规划决策的“机器大脑”
模仿人类小脑在运动规划与控制中的作用机制,构建操作技能的高效解释与表示模型,结合大模型、强化学习技术,提升机器人大脑自主决策能力。
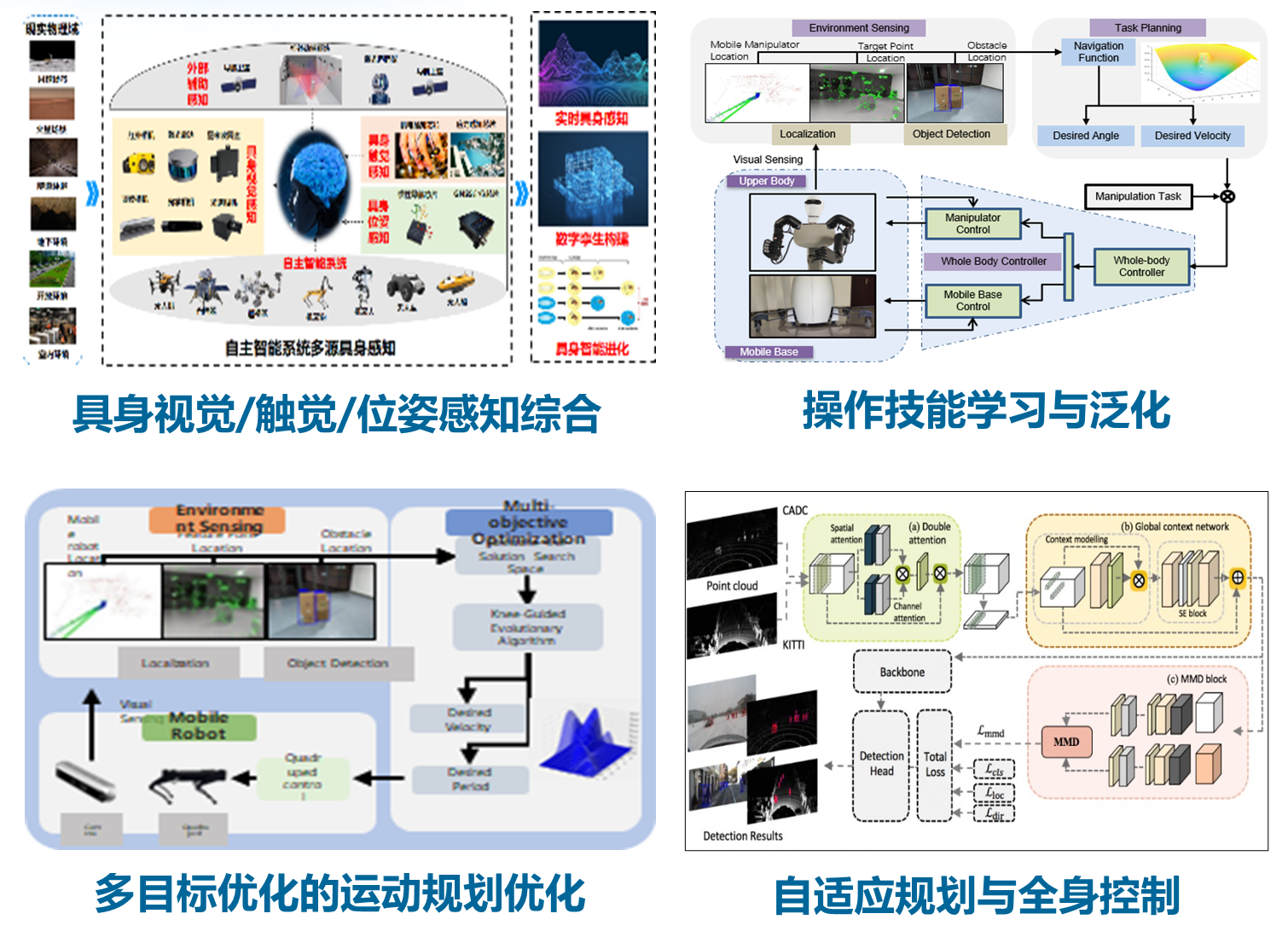
具身视觉/触觉/位姿感知
多任务场景的自主智能系统
操作技能学习与泛化
端到端机器人大模型

通讯地址:上海市曹安公路4800号开物馆
电子邮箱:auro@tongji.edu.cn
© 2025 Institute of Autonomous Intelligent Robotics. All rights reserved.